GPS Denied: How Visual Positioning Fills In When GPS Goes Down
The GPS Question

The world is over-reliant on GPS. And GPS is alarmingly vulnerable.
The daily fabric of life the Global Positioning System is threaded into is as unexpected as extensive. We count on GPS for financial transactions, cell phone networks, emergency services, even electrical grid function, and, among many other applications, of course, navigation.
It’s easy to forget that pilots navigated without GPS for many decades. They flew visually by looking out the window. Today this tried and true skill is nearly lost, but Daedalean is reviving it.
From the very foundation of our company, Daedalean has strived to develop the machine equivalent of human capabilities, and one of the three key skills of a human pilot is to fly according to visual flight rules (VFR) and in visual conditions.
Daedalean’s technology comes at an inflection point when our over-dependence on GPS is creating a weak spot precisely because of its effectiveness and prevalence.
Dr. Todd E. Humphreys, Director of the UT Radionavigation Laboratory, puts it this way:The problem is that the same transparency and predictability that have made civil GPS signals so wildly popular all across the globe give rise to a dangerous vulnerability.
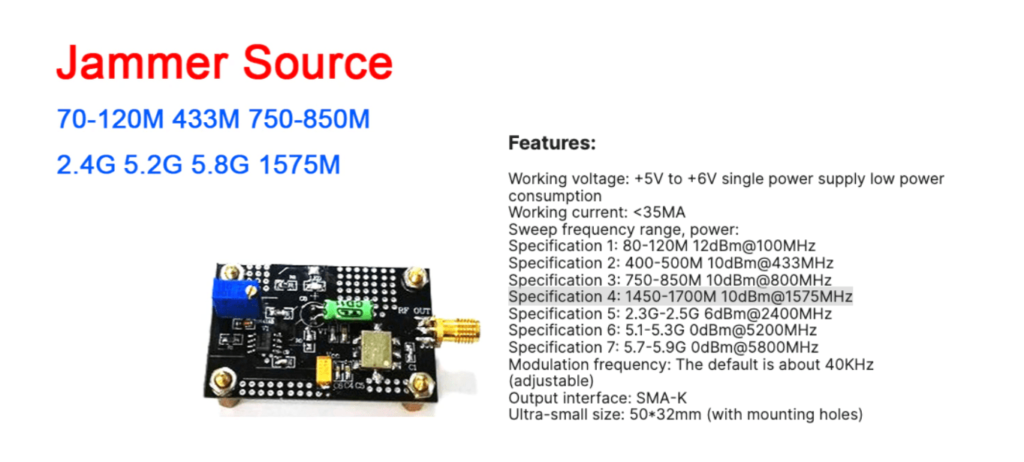
Transparency and predictability make the civil GPS signals easy to imitate — to counterfeit. The fact is that civil GPS signals are like Monopoly money: they have a detailed structure but no built-in protection against forgery.
And this forgery takes place big time. The scale of it can be seen at the website GPSJam — maps showing daily possible GPS interference.
The problem is now well-known:
- “Increased Russian GPS jamming hits signals in Baltics, Finland. Pilots in region forced to use alternative navigation systems” (March 2023)
- GPS jamming from Chinese military units in the South China Sea and the Philippine Sea (March 2023)
- “A 2019 report by a Washington, DC, think tank documented more than 10,000 cases of GPS interference in the last five years from Russia, including noting that Putin is intentionally spoofing his location and jamming GPS signals whenever he travels” (March 2019)
- ”The GPS interference has expanded on a scale that hasn’t been seen before… What we’re seeing now, since about a week ago, is GPS jamming bubbles covering hundreds if not thousands of kilometers around tactical Russian cities.” (December 2022)
- Drug traffickers are spoofing government border drones on the US-Mexico border (2015)
An emergency backup for GPS was mandated by the United States in the 2018 National Timing and Resilience Security Act. This law demanded the development, construction, and operation of a backup system within two years. Eleven systems were considered, but none have been chosen.
Meanwhile, solutions to the problem continue to be sought.
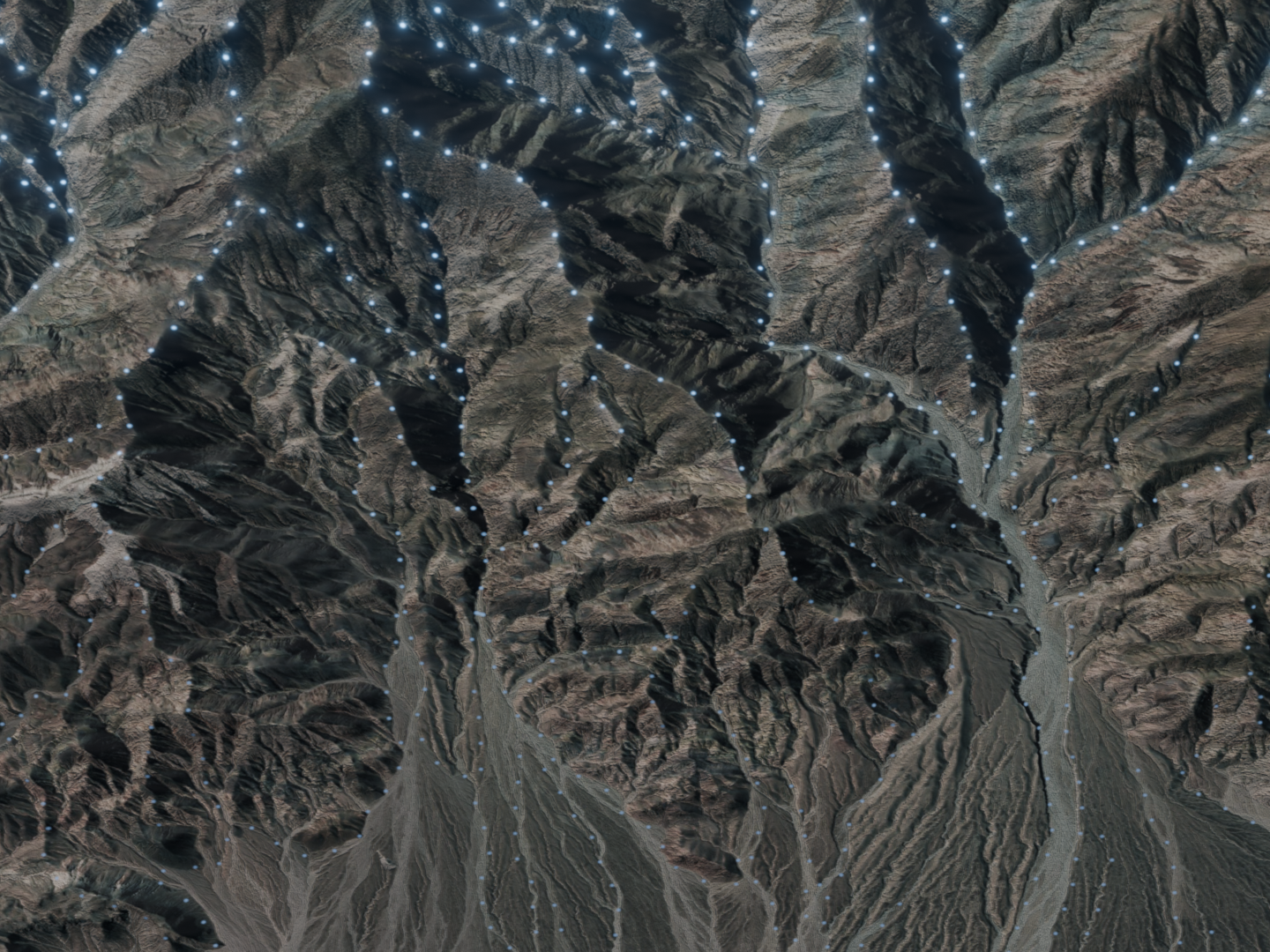
As a backup against the loss of GPS, Daedalean has developed its Visual Positioning System (VPS), which doesn’t require any external infrastructure. A camera mounted under the aircraft can take a look at the ground and figure out where the aircraft is — just like a human looking out the window.
How Does It Work?
The Daedalean VPS leverages two complementary processes for navigation: visual-based global localization and simultaneous localization and mapping (SLAM). Our Visual Global Positioning System (VGPS) handles the global localization, while our Visual Motion Unit (VMU) provides the SLAM functionality.
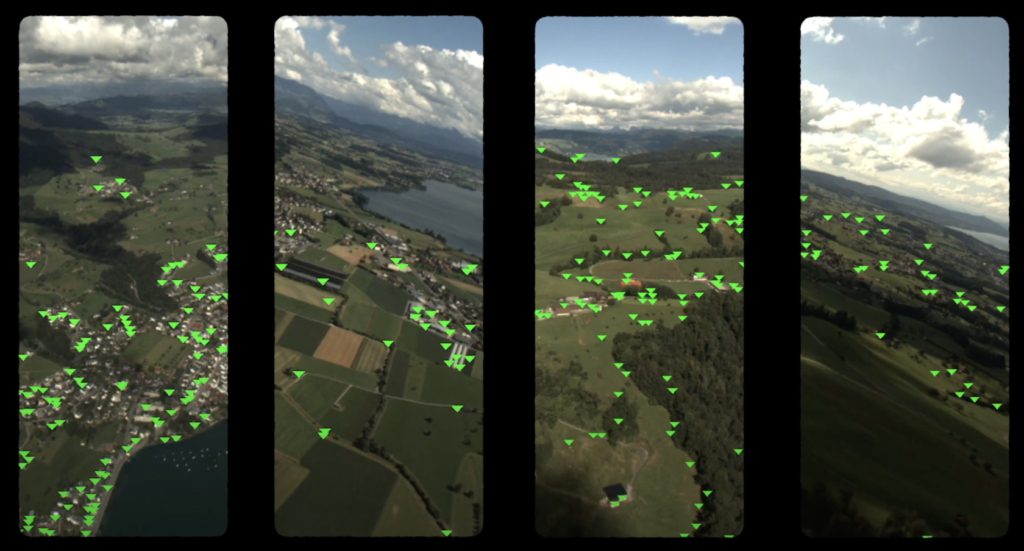
The VGPS matches position to global coordinates. For this, it needs a map — or, more accurately, a database of georeferenced landmarks — to match features, or elements of a landscape, against. The system estimates the 6D pose (position on the global WGS84 coordinates and orientation of the aircraft with respect to the Earth’s surface). The system essentially says: “This is where I am, and this is where I am currently headed.”
The VMU, on the other hand, calculates the distance and direction the aircraft has flown from a known starting point, enabling a consistent estimate of the aircraft’s position and orientation. This method, however, inherently accumulates errors over time — a common issue in SLAM-based navigation systems used in small drones. To address this, our system constantly cross-verifies the VMU’s estimated position with the VGPS’s map of georeferenced landmarks.
Generally, the VPS performs more effectively at higher altitudes, ideally starting from 200m above the ground. The higher the altitude, the fewer the details seen, which leads to more stable visible features across different seasons, weather conditions, lighting conditions, environmental changes, etc. At 500m, you will primarily see roads, buildings, trees, whereas at 50m, you might only see a field of grass.
The advantage of the VPS is that it’s a fusion of local (VMU) and global (VGPS) positioning, and it doesn’t always require the latter to function. The VMU component does not need a pre-existing map, but rather, it constructs its own on-the-fly. Therefore, even if the aircraft descends to levels where minimal features are visible or occasionally leaves the pre-surveyed area for a short period of time, the VPS will continue to navigate.
The VPS Requires Maps. Where Do These Maps Come From?
Maps are created through survey flights, our own or a customer’s, with a reference GPS onboard, and then are regularly updated and verified with data collected during normal operation. The map creation, update, and verification process follows the DO-200B standard. If the system is supposed only to work along fixed, known routes, we can easily collect sufficient survey data to build the maps (and afterward keep them up-to-date by using data collected during regular flights).
But flying survey flights can be cost-prohibitive or they simply might not have been flown for a given area. So Daedalean’s VPS team is working on an alternative solution.
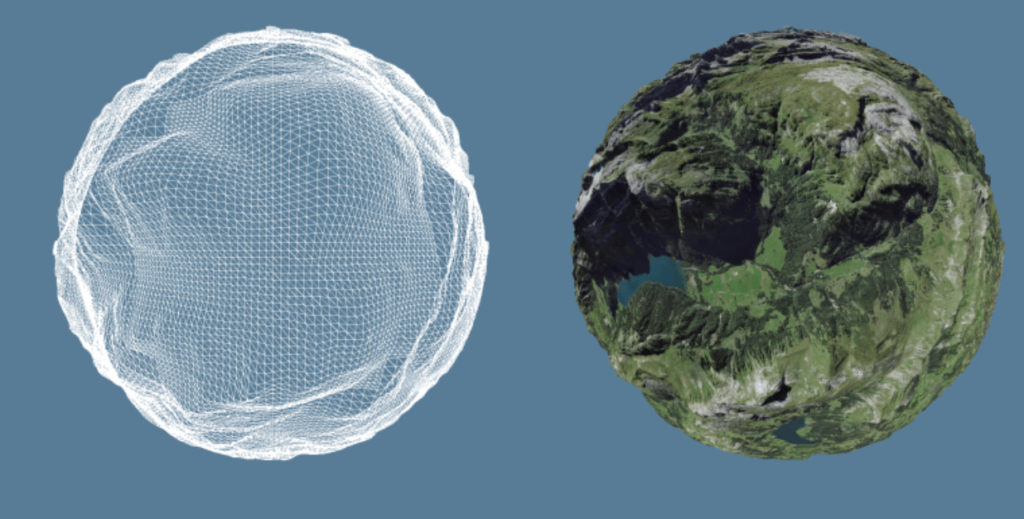
It is possible to create maps (sets of landscape features) from orthographic satellite imagery and terrain elevation data that already exist for many places around the world. Daedalean has developed a complete in-house system for rendering and map creation, which allows the use of third-party ground-truth terrain data. This requires some time to create the maps for the area, but it would, one day, make the VPS work out-of-the-box. No survey flights would be necessary then.
But maps generated from third-party data will only work well above approximately 200m above ground. They will work well for aircraft and heavy drones but not for small commercial and consumer drones, which are legally limited (by the FAA, EASA, the UK’s CAA, and their counterparts in many other countries) to remain below 400 feet above the ground (120m).

How Precise Is It?
Overall, the system provides navigation data comparable to high-end inertial navigation systems (INS), global navigation satellite systems (GNSS), and instrument landing systems (ILS). Horizontal accuracy is 4% of height AGL (above ground level), while vertical is 3% of height AGL. That means flying at 500m provides accuracies of 20m horizontal and 15m vertical. Since the system gets more accurate the closer you get to the ground, it’s even able to guide to a safe landing. By contrast, the altitude component of a GPS coordinate is often too imprecise for landing guidance.
What’s with Low Visibility?
Tests during nighttime, in limited visual conditions, or after drastic weather changes, such as after heavy snow, have been successful. We at Daedalean are looking forward to further developing and testing capability in low visibility, but it turns out that the system can function with as little as a 10% match with the map to localize itself.
Therefore, if there is at least some lighting below, or some visible features, we expect that the system will probably find its way. If the visibility is zero, so that no human pilot would see anything, or the terrain is completely featureless (say, if you fly over a completely white snow field in Antarctica or in the middle of a large desert), or without any lighting below whatsoever, then probably not. Also, not above water if there’s no coast in sight.
What about the Shelf Life of the Maps?
Daedalean’s system recognizes ground features, so since the Eiffel Tower hasn’t changed much in 100 years, it’s a very stable landmark. Manhattan skyscrapers would also work well since the skyline hasn’t changed drastically during the last 20-50 years. But Dubai’s skyline, on the other hand, keeps changing. After a year’s absence, you will not recognize some once-familiar parts of the city.
But even in places such as Dubai, the VPS can operate effectively without constantly having to redo survey flights. The system can tolerate most changes, even with significant differences, as long as a minimum of approximately 10% of the landmarks match up with the original survey map. The reason is that the system looks at thousands of features, not just the major landmarks. So it is not important for every single feature to be recognized under all circumstances.
The same goes for flying in (snowy) winter with a map made in summer and vice versa.
Does GPS Need to Be Denied to Use Daedalean’s VPS?
Absolutely not. The VPS is aimed at integrating with existing INS-/GNSS-based navigation systems, barometer data, and inertial measurements (IMU), as well as any kind of radar, lidar, or longwave infrared camera, while offering dissimilar capabilities such as operating in challenging conditions like fog, darkness, or cloud cover.
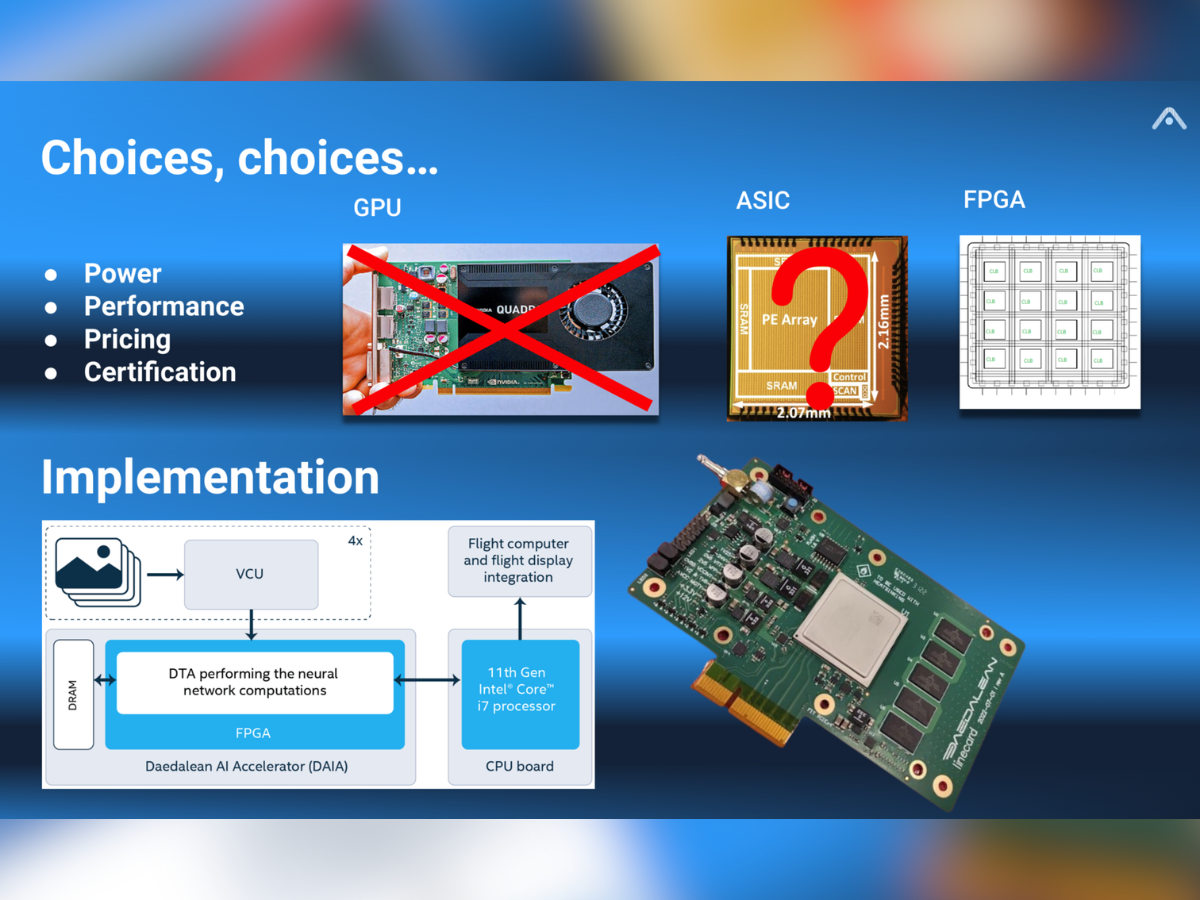
What Is the SWaP?
Currently, the computing box weighs 4kg. The dimensions are 215mm x 164mm x 170mm. This excludes connectors and custom attachment brackets for cameras. It draws continuous power between 60 — 200W with peaks of 71 — 215W.
With GPS under threat and over-relied upon, a robust backup system is a must. The Daedalean VPS is designed to provide uninterrupted, reliable, and redundant navigation.
This article was originally published by Daedalean.