
Part 1 of this blog series analyzed the evolution of road safety and the growing importance of ADAS. It considered the different maturity levels of new car assessment programs worldwide, highlighting the various agencies that have been quick to evolve their assessment programs to incorporate additional ADAS testing.
In Part 2, we look to understand the testing requirements for new vehicles regarding automated driver assistance systems (ADAS) under new car assessment programs (NCAP). This post delivers an overview of the scenarios, conditions, and environments in which testing is performed and takes a forward-looking approach to delve into how ADAS testing for NCAP will evolve over the coming years. It also indicates the stresses such an evolution puts on a sensor fusion and perception system. Finally, it examines LeddarTech’s low-level sensor fusion and perception technology and how it handles NCAP testing to enable OEMs and Tier 1-2 suppliers to deliver 5-star safety-rated vehicles to consumers.
Testing Requirements of NCAP Today
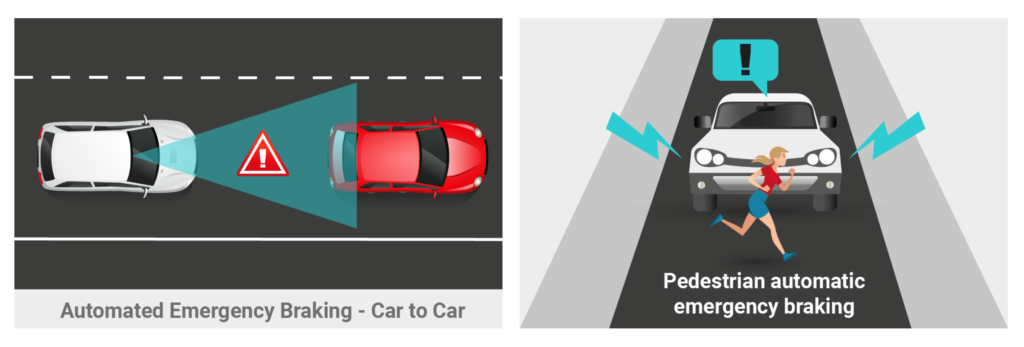
For a vehicle to rank well on NCAP ADAS tests, its fusion and perception system must perform well under a myriad of conditions and show strong performance on multiple criteria under multiple scenarios. For example, Euro NCAP introduced automated emergency braking (AEB) ADAS testing involving car-to-car crashes. As provided in the Euro NCAP AEB C2C Test Protocol – v4.1.1, the vehicle is tested in the following scenarios:
- Car-to-car rear stationary (CCRs): A collision in which a vehicle travels forwards towards another stationary vehicle, and the frontal structure of the vehicle strikes the rear structure of the other
- Car-to-car rear moving (CCRm): A collision in which a vehicle travels forwards towards another vehicle traveling at a constant speed, and the frontal structure of the vehicle strikes the rear structure of the other
- Car-to-car rear braking (CCRb): A collision in which a vehicle travels forwards towards another vehicle that is traveling at a constant speed and then decelerates, and the frontal structure of the vehicle strikes the rear structure of the other
- Car-to-car front turn-across-path (CCFtap): A collision in which a vehicle turns across the path of an oncoming vehicle traveling at a constant speed, and the frontal structure of the vehicle strikes the front structure of the other
- Car-to-car crossing straight crossing path (CCCscp): A collision in which a vehicle travels forwards along a straight path across a junction towards a vehicle crossing the junction on a perpendicular path. The frontal structure of the vehicle under test strikes the side of the other vehicle
- Car-to-car front head-on straight (CCFhos): A collision where a vehicle is traveling along a straight path within its defined lane and strikes another vehicle traveling in the opposite direction, which has drifted into the same lane as the original vehicle. The frontal structure of the vehicle strikes the frontal structure of the other
- Car-to-car front head-on lane change (CCFhol): A collision where a vehicle is traveling along a straight path within its defined lane and strikes another vehicle traveling in the opposite direction, which has intentionally moved into the lane of the original vehicle to attempt an overtake. The frontal structure of the vehicle strikes the frontal structure of the other
New car assessment authorities produce test protocol documents specifying the conditions and procedures to be followed when testing the vehicle. Testing is further complicated by the multitude of tests performed on the vehicle by changing one or more test conditions. Some of the changing variables within these tests are:
- Test vehicle speed
- Another vehicle/object speed
- Vehicle/object’s angle of introduction (inline, head-on, perpendicular)
- Whether the object is being introduced from the near or far side
- Whether the object is occluded or not
The testing needs multiply very quickly. While the tests mentioned above are conducted only for car-to-car scenarios, the addition of vulnerable road users such as pedestrians and cyclists to testing requirements further examines the AEB system’s capabilities for broader coverage and enhanced operation. The test protocol also specifies the weather conditions, brake warm-up procedure, tire conditions, and many other requirements before testing. Euro NCAP AEB C2C Test Protocol – v4.1.1 stipulates that ADAS tests be conducted in dry conditions with wind speeds below 10 m/s and homogeneous natural ambient illumination across the test area. Furthermore, it stipulates that tests are not performed driving towards or away from the sun when there is direct sunlight.
Future Testing Requirements of NCAP and the Challenges Therein
The future of ADAS testing under NCAP is marked by lower error margins, increased complexity, and varied testing.
Existing test protocols, while robust and covering many aspects of ADAS performance test vehicles under best-weather conditions. Future testing of NCAP will incorporate night-time, and inclement weather testing wherein vehicles shall be subjected to testing in various challenging conditions such as low light and heavy precipitation, fog, or snow, and varying degrees of traction/reflectivity of the surface to simulate actual driving conditions faced by drivers. Additionally, vehicles must show ADAS performance against direct sunlight and degraded sensors to succeed.
Given the existing challenges and those that lie ahead regarding ADAS testing for new vehicles, sensor fusion and perception solutions must perform well across varied environments, conditions, and scenarios. Sensor fusion and perception systems must be scalable and sensor-agnostic so that future advancements in ADAS can be built on the same platform without needing to build again from scratch. A scalable system reduces R&D time and cost for OEMs and Tier 1-2s, enabling them to go to market faster and deliver these life-saving technology to the masses. Sensor-agnostic perception systems ensure that ADAS advancement is not restricted by the sensor hardware, giving OEMs and Tier 1-2s the power to employ the sensor architecture they deem fit for their specific application needs.
Most importantly, sensor fusion and perception systems must remain cost-effective while delivering high performance, not just in object detection and classification but also object separation, occluded object detection and false alarm reduction.
Low-level Sensor Fusion to Enable 5-star Safety Rating
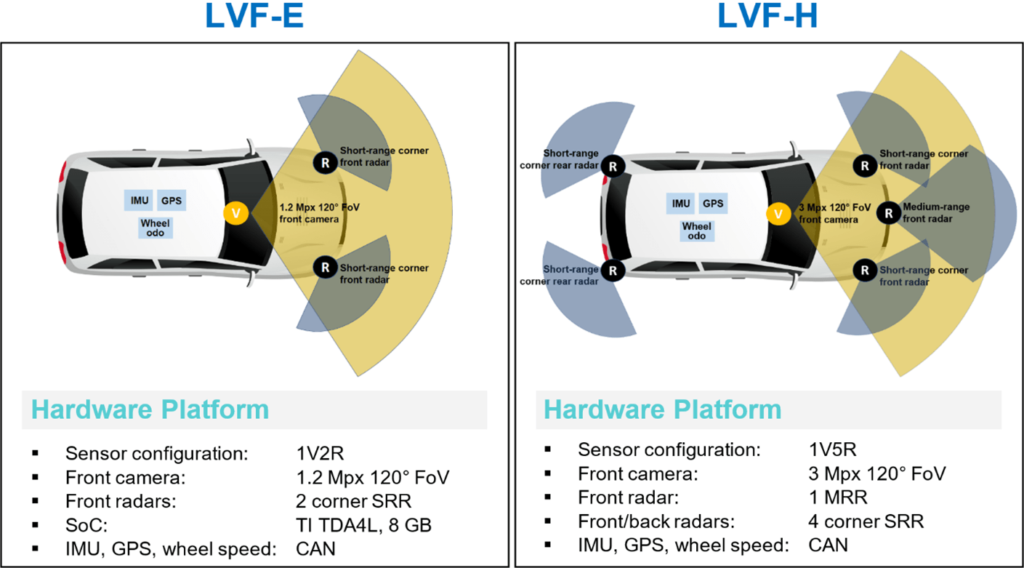
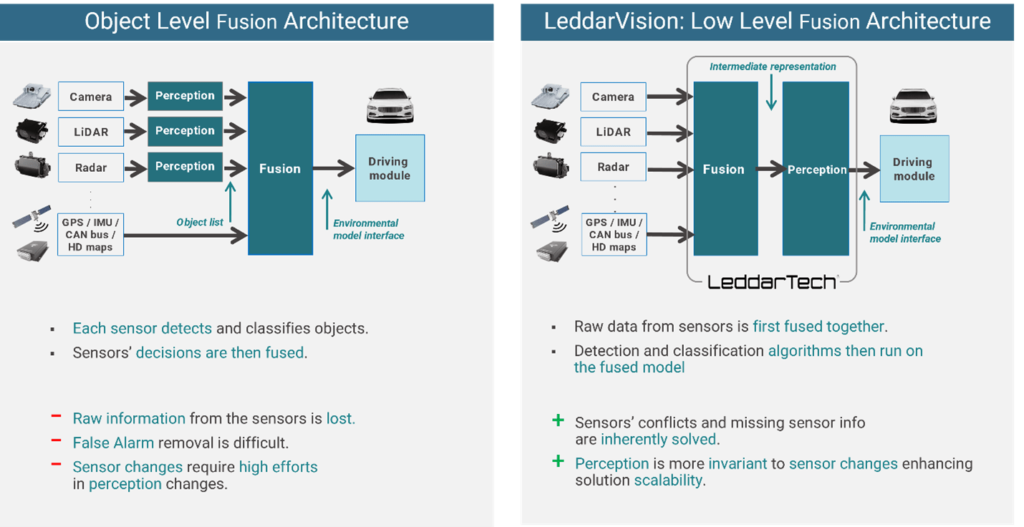
High performance and cost-effectiveness are two key elements in providing 5-star safety to the masses. Delivering cost-effective products that significantly improve ADAS performance has been a critical objective for LeddarTech in its mission to make mobility safer. Today, the automotive software supplier enables OEMs and Tier 1-2s to unlock new levels of ADAS performance. They do so by leveraging proprietary low-level fusion and perception technology. LeddarTech has delivered two comprehensive front-view products, LVF-E (entry) and LVF-H (high), that cost-effectively provide the performance required to reach 5-star safety ratings.
LeddarVision perception stack extends safety features support with detected objects trajectory prediction, perception decomposition, ODD analysis, sensor coverage, and health monitoring. LeddarVision’s low-level fusion technology optimally combines sensor modalities, pushing the performance envelope far beyond legacy solutions and extending the supported object detection fusion range to over 200 m. LVF-H’s superior object detection performance extends to occluded VRUs and vehicles, providing early warning in NCAP-tested scenarios (e.g., occluded cyclist tests).
LeddarVision’s ability to detect and track objects under poor weather conditions such as fog, rain, and snow and even when the camera is saturated against direct sunlight makes safe and reliable ADAS a reality. In addition, the system’s capability to detect and track objects if the camera fails and to continue operation despite a dirty lens are examples of how LeddarVision outperforms legacy object-level fusion solutions in various environments and conditions.
The perception system’s ability to develop an accurate environmental model is the third element in realizing strong NCAP performance. LeddarVision’s demonstrated performance in small object detection, superior object separation, and longitudinal position measurement accuracy in highway scenarios form the basis of a perception system that delivers a unified environmental model with support for HD Map and V2X. In addition, Euro NCAP 2025 roadmap mentions the use of V2X communication as a critical piece in improving road safety through vehicle-to-everything communication by transmitting and receiving messages like “Emergency brake,” “Approaching motorcycle,” or “Roadwork ahead.”
Finally, low false alarms are critical to user adoption of the ADAS feature. The criticality of low false alarms is best highlighted by NHTSA from the U.S.A., expressing concerns over vehicle owners disengaging ADAS features due to wrongful activations. It has gone so far as to propose reducing warning activation thresholds to increase consumer adoption of the technology.
Summary
Road safety has and continues to go through incremental changes. Vehicle safety solutions have traditionally revolved around mechanical innovations such as airbags, seatbelts, and stronger frames. However, the future of road safety will be determined by a vehicle’s ability to avoid or mitigate an accident, and to achieve this a robust performing fusion and perception software is required. The perception system must be scalable, offer high performance in a variety of scenarios, conditions, and environments, and be cost-effective to accelerate adoption. LeddarTech’s two front-view products (LVF-E and LVF-H) are two distinct comprehensive low-level fusion and perception software products that optimally combine sensor modalities for Level 2/2+ ADAS applications to enable a 5-star NCAP 2025/GSR 2022 rating.
Click HERE to see Part one of this two-part Blog Series.
This article was originally published by LeddarTech.










