Cost, specifications, form factor, safety and quality requirements of the automotive sector set very high demands for commercially deployable LiDARs.
In terms of specifications, range, resolution, frame rate and FoV are some of the key parameters that LiDARs need to perform well on. This piece takes a mathematical approach to determining how LiDAR range can be improved.
A variation of the basic LiDAR equation is presented below[1]:
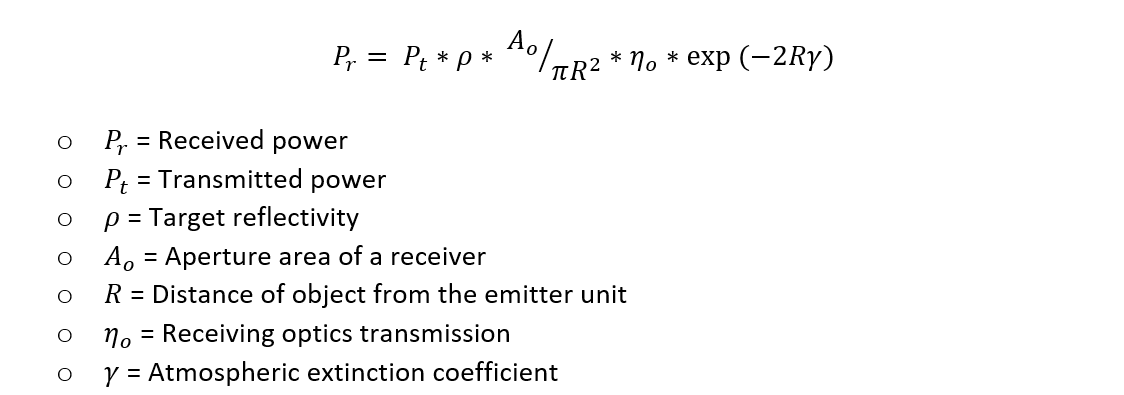
The maximum object distance possible at which an object can be detected is the LiDAR range. This LiDAR equation assumes normal incidence, Lambertian reflection, flat beam profile and negligible divergence. The equations shows that power received is directly proportional to power transmitted and aperture area of the receiver while inversely proportional to object distance.
The received power plays a critical role in determining the range of a LiDAR since it plays a critical role in determining the signal-to-noise-ratio. At the basic level, the LiDAR range is determined by:
- Background noise
- Photons detected by the photodetector (signal)
The signal-to-noise ratio (SNR) is a key parameter used to differentiate between object-reflected signal and background noise. The maximum LiDAR range can be expressed as the maximum distance at which the signal processing subsystem in the LiDAR is able to differentiate between signal and background noise. The measure of the strength of a signal vs the background noise is given by signal-to-noise ratio.
Background noise sources in LiDAR within the context of autonomous driving consist of any source of light close enough to the sensor’s operating wavelength that can be mistaken for the signal itself (sunlight, car headlights, road lighting). Some issues arising from this are missed object detections or false detections. Electromagnetic waves emitted by the sun are of a broad spectrum and are the main source of ambient noise during the day. To counter this, background noise is filtered using narrow-bandpass filters, which are devices that allow frequencies within a specific range to pass through while blocking other frequencies. The signal-to-noise ratio equation[2] is presented below for reference:
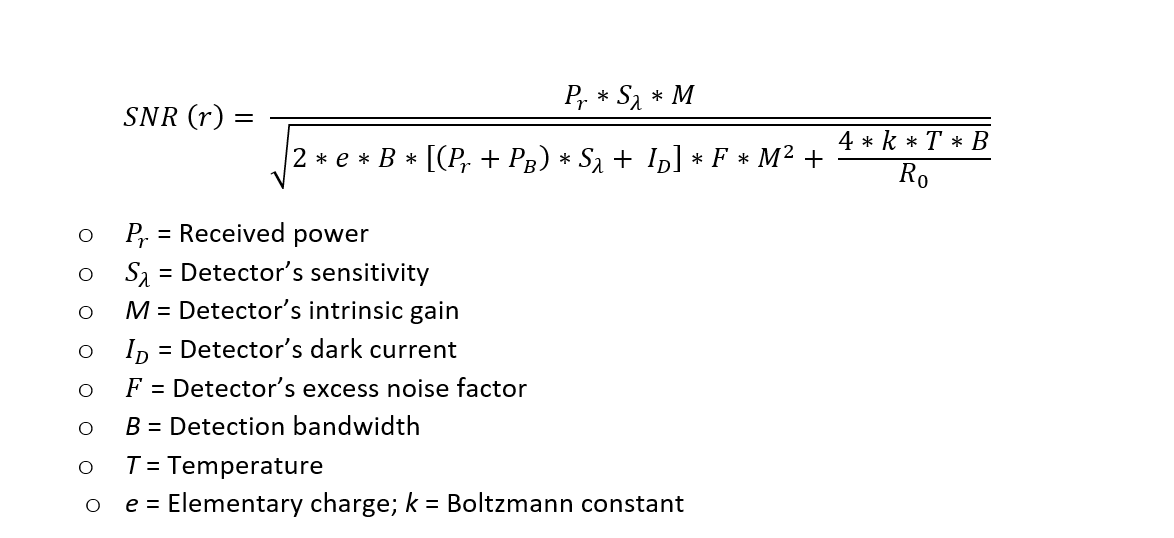
As shown above, the SNR is directly proportional to received power, the detector’s intrinsic gain and detector’s sensitivity and therefore to achieve higher range either higher power must be received, or front-end signal acquisition and waveform processing systems must be optimized.
[1] [2] Hamamatsu Photonics. “Lidar, Radar, and Cameras: Measuring Distance with Light in the Automotive Industry.” YouTube, YouTube, 12 Feb. 2018, https://www.youtube.com/watch?v=D5Hh8EuOD2Q.
This article was originally published by LeddarTech.