The first thing one would notice about this future city’s skyline is the array of sleek, vertical structures—vertiports.
Some are atop high-rise buildings, while others are standalone, dotting the landscape. Their lights designate safe takeoff and landing zones.

The sky is busy—perhaps not as congested as our typical car traffic since the distances between the vehicles are greater, but it is still densely packed. This is partly because the air paths lay on many levels in the three-dimensional sky, creating a constant yet organized flow. These vehicles—eVTOLs—resemble futuristic drones; some are large enough to carry multiple passengers, while others are smaller and reserved for cargo. They rise vertically from the vertiports and transition smoothly to forward flight.
There’s no roaring noise like traditional helicopters; instead, there’s a soft electric hum, making city noise levels much more bearable.
On the streets below, pedestrian zones have expanded, as there’s reduced dependency on cars and buses. The city’s air quality has noticeably improved.
People look up, maybe using augmented reality glasses to check for available rides or identify different eVTOL models. Digital screens at public transport hubs show real-time UAM schedules alongside trains and buses.
UAM has made it convenient for people to commute from outside the city. Rural-urban connections are stronger, as people can live far from crowded city centers.
This vision is not as futuristic as it might seem. More and more eVTOL manufacturers are approaching the production phase, and an increasing number of successful flight tests and demo flights are taking place. Many are nearing certification. The first efforts on constructing vertiports in cities have begun.
However, just as with ground-based transport, it is not enough to simply design safe and reliable individual car models. For everyone’s safety, traffic rules must be established across entire cities, regions, and nations to allow the higher volume of overall traffic to be an integral part of a city. Particular eVTOL models may well be certified, but their certification is not equivalent to approval for commercial operations; these vehicles will not be flying until UAM traffic regulations are established. And as of now, there are no specific rules incorporating UAM.
The existing rules and regulations in aviation mostly depend on human-to-human communications between pilot and Air Traffic Control (ATC) over a voice channel and hence are more geared towards managing conventional aircraft in broader airspace. Near urban areas, there are specific airways (referred to as corridors) designated for aircraft to follow. These airways are essentially highways in the sky, and they help ATC to organize and separate traffic.
The current separation standards can tolerate only a small number of aircraft over a large city without risking a collision. For example, according to ICAO Doc 4444, Procedures for Air Traffic Management, for two aircraft following the same track the spacing between them is never less than 15 minutes of flight, and when a radar or ADS-B is used, the minimum separation in a general case should be 5 nautical miles (about 9.26 km). But if we want air taxis and small cargo transports to become a relevant part of our urban airspace, they need to be able to operate at a much higher density at an equal (or higher) level of safety.
International regulators are well aware of the lack of standards suitable for the future UAM and started developing concepts of operation for it long ago. This year, the FAA published the UAM ConOps Version 2.0. It suggests that early eVTOL air taxi operations should use existing helicopter flight corridors and helipads to support the small number of infrequent flights that will follow the same rules as any other aircraft flying today. As more air taxis become operational, they could begin flying in their own designated corridors, first as one-way routes.
Last year, NASA published a whitepaper on Digital Flight Rules. It represents the third set in a series of rules, adding on to the existing Visual Flight Rules (VFR) and Instrument Flight Rules (IFR). VFR governed all flight during aviation’s early days. In the last century, IFR enabled a dramatic expansion of aviation services and airspace use that VFR alone could not support. Now DFR becomes a natural progression in airspace operations.
According to NASA’s paper, self-piloted aircraft will not use the help of ATC as an intermediary to deconflict: they will exchange information digitally, directly through vehicle-to-vehicle communication. This direct and automated information exchange will be immediate, unlike the current comparably slow verbal back-and-forth exchange. Only DFR are now introducing this digital direct vehicle-to-vehicle ‘conversation’: without it, air traffic density cannot be significantly increased while maintaining safety standards.
Various companies are considering the technological feasibility of bringing these concepts of operation to life. Here at Daedalean we just might have a robust and affordable solution that can be implemented over the existing urban infrastructure.
BRAVEN: Daedalean’s Onboard Collision Warning Solution for UAM and General Aviation
This April, Daedalean was awarded a grant by Innosuisse toward the development of a solution called BRAVEN: Bimodal Radar for AViation Environments. This solution exists in the same vein as the UAM concepts of operations, allowing for the scaling of much higher air density in cities in a safe manner.
Daedalean’s research team was looking for an onboard collision warning solution. It had to be low-SWAP, function in all weather and visibility conditions, and be certifiable for installation on civil aircraft. We wanted this solution to be compatible with our visual-based system to provide broader situational awareness (as they operate on different physical principles, they complement each other really well). But this solution should have also been a completely self-sufficient product.
Various types of transponders, such as ADS-B and FLARM, are widely used in civil aviation, but they ‘see’ only those who also have a transponder. Among sensors, drone detection radars seemed to resemble what we were looking for, but they are effective only over short distances.
So we developed our own radar system.
Radar stands for Radio Detection and Ranging; it is a system that emits radio waves in a specific direction and then listens for any echoes. If something reflects these radio waves, the radar can detect that something is there, and based on the delay in receiving the reflection, it can estimate how far away it is.
The most common setup for both airborne and ground-based applications is a radar where the transmitter and receiver are located in the same place. This setup is called monostatic. It’s similar to making a noise and listening for the echo yourself. The setup is neat and simple, meaning that there is no need for any additional infrastructure.
But it won’t work in a dense traffic with dozens of aircraft in one place – that many working emitters will create dangerous interference. Another limitation is its SWaP: as it contains an active transmitter, it is relatively heavy and requires a lot of power.
So we are going to place half the system on the ground. This setup locates the transmitters at fixed locations where they constantly emit signals, akin to a continuous broadcast. Any aircraft equipped with receiving antennas can detect these signals and thus detect other objects around them. This is a bistatic radar setup.
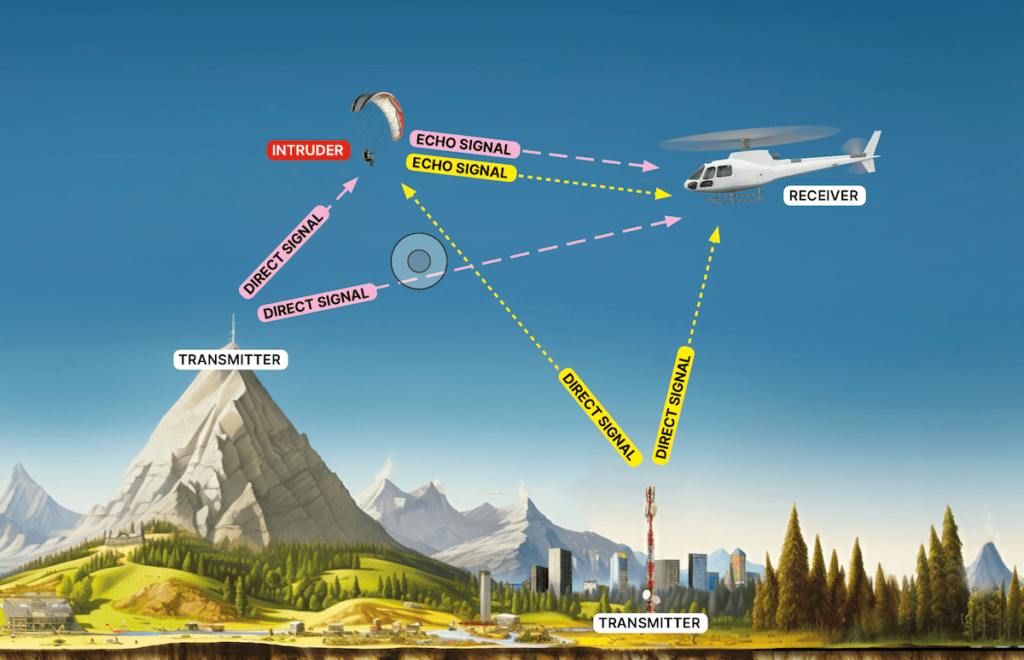
Receiving antennas are purely passive — they do not emit any signals, which means they don’t interfere with each other, allowing for a large number of aircraft in a small space. It also means that the system is more lightweight and energy-efficient: as an aircraft doesn’t need to emit energy, the entire system consumes less power.
This system, however, requires infrastructure – a grid of ground-based emitters. For these emitters to work, there should be a direct line of sight between the aircraft and the emitter. Currently, we are estimating the system can be effective with only one emitter every 15 km. There’s no need for any special construction to mount it: to be easily visible from a distance, they can be placed on existing cell towers or rooftops. The device is a simple metal box that only needs an electrical socket to operate.
It likely won’t be feasible to cover the entire Earth or a large country with these ground emitters. For the very same reason, it won’t be useful for large airliners that travel long distances.
However, in the context of urban air mobility, where numerous devices—not 5, not 10, but possibly hundreds—might need to operate within a city (with its already existing infrastructure of cell towers and rooftops), bistatic radar represents a specific and potentially ideal solution.
One final remark: It would be a mistake to assume that this BRAVEN solution is solely for cities of the future, with sleek vertiports and dense UAM traffic in the sky, existing maybe some ten or fifteen years from now. Even before eVTOLs whisk passengers above the gleaming cityscape, urban skies will continue to get busier every day. Modern cities are already increasingly deploying large drones and helicopters for public safety tasks such as disaster response, search and rescue, surveillance etc. Having a ground infrastructure accessible to anyone with a lightweight and affordable receiver to prevent collisions in any weather and visibility conditions – from nighttime and fog to rain and snow – will significantly enhance safety as soon as it’s operational.
For more information on bistatic radar, please refer to our factsheet about BRAVEN.
This article was originally published by Daedalean.