Alongside displaying the latest developments in ADAS and automated driving, AutoSens Brussels explored the relevant infrastructure requirements for deploying connected and autonomous vehicles.
Notably, vehicle-to-everything (V2X) technology, which enables cars to communicate with neighbouring vehicles, roadway infrastructure and the cloud, has the potential to significantly enhance safety and facilitate automated driving. However, the AutoSens conference highlighted how the V2X market has not taken off, especially when compared to other automotive trends such as ADAS, infotainment and electrification.
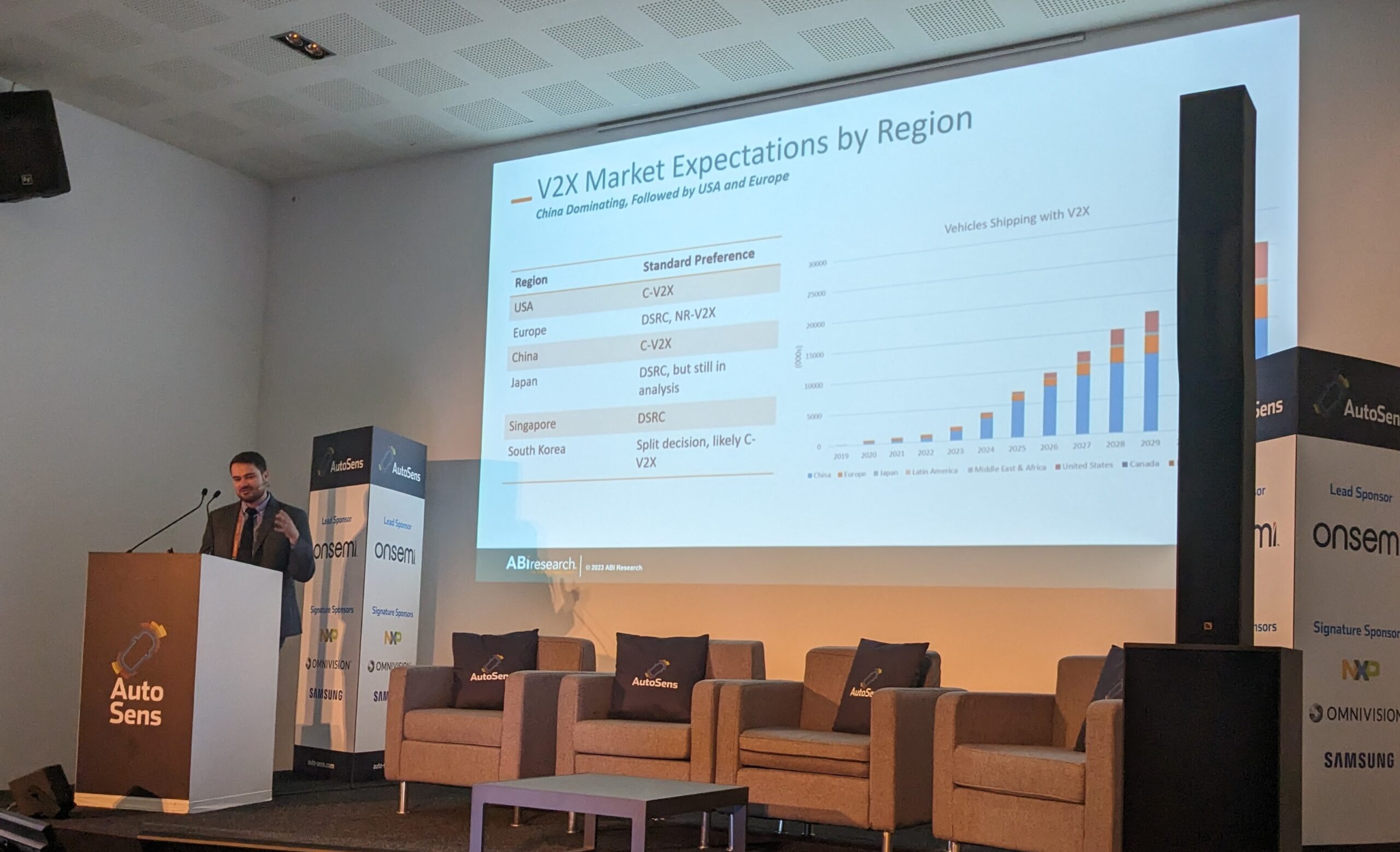
In his keynote session entitled, ‘V2X in 2023: Progress, Challenges and Recommendations,’ James Hodgson, Research Director at ABI Research, acknowledged that although Volkswagen took the lead in equipping volume models such as the Golf with the IEEE 802.11p standard to enable wireless communication between cars and infrastructure, other OEMs in Europe have not followed suit.
This technology could significantly enhance road safety if all vehicles, regardless of their manufacturer, received mili-second updates on the surrounding traffic and environment, he said. However, Hodgson noted that it would take a considerable amount of time for this potential to have any tangible impact, especially in relation to vehicle-to-vehicle (V2V) communication, where all interacting vehicles need to be equipped for the technology to be effective.
He argued that as a result, vehicle-to-infrastructure (V2I) technology was key to providing value in the short term. As an initial application, V2I technology could be used to provide signal priority for emergency response vehicles, public transit and heavy-duty vehicles. V2I, he felt, could consequently help save lives, improve transport and reduce unnecessary emissions by keeping these vehicles moving. These use cases are driving the installation of V2I technology at intersections, laying the foundation for future autonomous vehicle applications and communications.
Regardless, Hodgson stated that ABI Research did not predict this deployment to be fast-moving, as tens of thousands of intersections would need to be equipped at a national scale. Instead, deployment was likely to happen regionally, with individual cities enhancing their fleets, gradually leading to more widespread deployment in the long term.
When considering the potential for more immediate infrastructure developments, Robert Dingess, President of the Traffic Marking Manufacturers Alliance (TMMA) emphasised that road markings in cold weather states got changed every 1–2 years, while those in warm weather states got changed every 3–5 years. This work could provide an ideal opportunity to ensure road markings are optimised for computer sensing to support the deployment of automated driving (AD).
This discussion took place as part of a panel session with members of the newly-formed Research Consortium, BELLORAMA. The panel consisted of Prof. Alexander Braun, Professor of Physics at the University of Applied Sciences Dusseldorf; Robert Dingess, President of TMMA; and Patrick Denny, Lecturer in Artificial Intelligence at the University of Limerick. These panel members argued in favour of developing a new reference observer representative of AD and ADAS.

Patrick Denny, Lecturer in Artificial Intelligence at the University of Limerick said:The goal of trying to have non-biological reference model is to force us to think about these things not from the perspective of a human. When you’re in the computer vision space, you don't have colour. When you sharpen an image, you don't sharpen for a human, you sharpen for an algorithm. This is the kind of thinking we are trying to push forward.
Currently, road infrastructure is designed to a standard optimised for human visuals; however, with the rollout of ADAS technologies such as automated lane-keeping systems (ALKS), the focus should arguably shift to also consider the needs of computers. Indeed, during the panel discussion, Dingess stated that lane-keeping systems often failed because of the diversity of road markings. However, by defining a new reference observer for non-biological entities, new standards could be set to help optimise these systems for computers.

This argument also remains relevant to additional road infrastructure such as road signs, which are detected by intelligent speed-assistance (ISA) systems to establish the local speed limit.
AutoSens thus highlighted the relevance of such considerations and demonstrated that, in addition to developing new sensors, software and automotive technology, the industry should also focus on the external, roadside infrastructure that could help support these systems.
Indeed, as Level 3 and Level 4 technologies are developed, the need to optimise road infrastructure to support computer sensing and therefore autonomous technology arguably becomes more crucial as AVs without such assistance could struggle.