How we’re training the Aurora Driver to safely share the road with law enforcement and first responders.
By Nemanja Djuric and Gary Yang, Perception.
Our Aurora Driver-powered trucks will travel hundreds of miles while hauling customer freight back and forth across Texas. During those trips, they will inevitably encounter emergency vehicles—in fact, there’s a good chance they’ll come across at least one per trip.
How do we know this? Let’s look at some quick stats:
- There are nearly 73,500 Emergency Medical Services (EMS) vehicles such as ambulances and fire engines in the U.S. By a conservative estimation, around 5,000 of those EMS vehicles currently operate in Texas.
- There are also somewhere between 250,000 and 300,000 law enforcement vehicles in use across the U.S., and approximately 5,000 of those vehicles are operated by the Texas Department of Public Safety.
- Lastly, there are approximately 8.8 million highway lane miles* in the United States. In Texas, where we are launching Aurora Horizon, there are over 679,917 highway lane miles—more than any other state.
*According to the Office of Highway Policy Information, FHWA, lane miles are calculated by multiplying a highway’s length by its number of lanes.
That puts us at approximately 10,000 law enforcement or EMS vehicles covering 679,917 highway lane miles. If we assume that maybe only a tenth of those vehicles are actually out and about at any given time on the state’s highways, that’s still one emergency vehicle for every 70 or so lane miles.
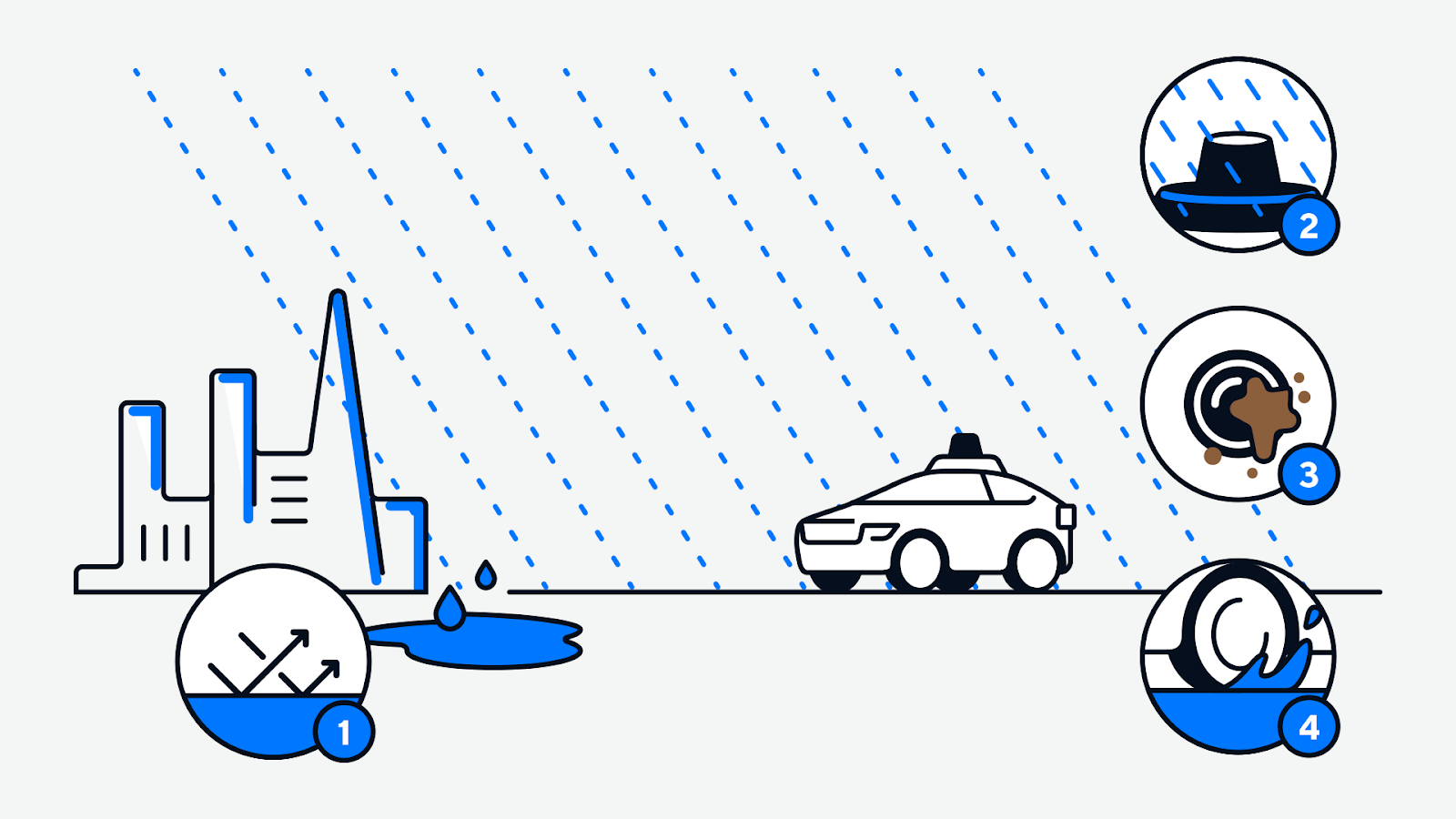
In order to launch our autonomous trucking service in Texas, the Aurora Driver needs to know how to safely and appropriately respond to all manner of emergency vehicles, from highway patrol cars and police vehicles to fire engines, ambulances, and even public utility vehicles. This diversity in appearance coupled with the wide variety of possible situations involving an emergency vehicle that the Aurora Driver could encounter make detecting and responding to emergency vehicles challenging.

Lights and Sirens
Human drivers use their eyes and ears to see the flashing lights and hear the sirens that indicate an emergency vehicle is active. In much the same way, in Texas, the Aurora Driver will rely on cameras and audio sensing capabilities.
Using labeled camera data, we are training the Aurora Driver to recognize that rapid changes in the brightness and colors of lights mounted on vehicles should be associated with emergency vehicles. Using labeled audio files, we are looking into training the Aurora Driver to recognize different types of sirens at varying levels of volume and proximity.
Once the Aurora Driver has detected an active emergency vehicle, it will need to figure out whether its own path is affected and what actions, if any, it should take in response.
The Rules of the Road
To keep itself and other road users safe, we are teaching the Aurora Driver to behave like a good citizen of the road. This means not only yielding the right of way to an active emergency vehicle or pulling over to the right side of the road to allow one to pass by, but also executing these maneuvers in a safe, responsible, and predictable way—without blocking intersections or confusing other drivers.
It also means complying with state-specific laws whenever possible. For example, the Texas Emergency Vehicle Laws state that vehicles traveling behind an active emergency vehicle must remain at least 500 feet away. The “Move Over or Slow Down” law (which also applies to active construction zones) requires drivers to either move over one lane or slow to 20 MPH below the posted speed limit when approaching and passing a stationary but active emergency vehicle.
The Aurora Driver must also learn the unspoken rules of the road that come intuitively to human drivers. We want the Aurora Driver to behave like the best human driver would, so we rely heavily on the experience of the former truck drivers on our team. For example, we learned that truck drivers wait until they can determine whether an emergency vehicle will affect their lane before deciding whether they should slow, lane change, or yield.
For more complex scenarios that require human judgment, such as an accident scene or if an active emergency vehicle is blocking a traffic lane, the Aurora Driver will request guidance from a remote assistant using Aurora Beacon. In these cases, the remote assistant will suggest courses of action for the Aurora Driver to act on when it determines that it is safe to do so.
Data and Drills
We teach the Aurora Driver’s perception and motion planning systems to detect, recognize, and react to emergency vehicles in different scenarios using large amounts of data. Some of that training data is captured during our regular autonomous and manual road operations. But to ensure we have enough data on each emergency vehicle scenario we want the Aurora Driver to handle, we also conduct data collection projects at test tracks.

Recently, at our Almono test track in Pittsburgh, Pennsylvania, and at the Transportation Research Center’s four-lane high-speed test track in East Liberty, Ohio, we recorded mock emergency vehicle maneuvers with a small fleet of law enforcement-issue vehicles. Some of our Vehicle Operators manually drove Aurora Driver-enabled vehicles around the tracks while others used the emergency vehicles to reenact traffic stops, high-speed pursuits, and even accident scenes.
To provide the Aurora Driver’s motion planner with data on the appropriate reactions to each scenario, our Vehicle Operators demonstrated slowing down while passing active emergency vehicles on the side of the road, pulling over to allow active emergency vehicles to pass by, and responding to visual and auditory signals.
The data we captured has now been converted into simulations in our Virtual Testing Suite, allowing us to generate thousands of new, increasingly complex variations of each scenario that can be used to train and test the Aurora Driver.

In Case of Emergency
To operate as a commercial product capable of delivering safe and efficient self-driving services at scale, the Aurora Driver needs to be able to handle emergency vehicle interactions in a safe and compliant way.
We are working closely with law enforcement agencies and regulators such as the Texas Department of Public Safety to ensure that when our Aurora Horizon autonomous trucking service launches, they can feel secure in the fact that our trucks will respond predictably and appropriately.
We plan to release the Aurora Driver’s responding to active emergency vehicles capability as part of Aurora Driver Beta 5.0, at the end of this year.
This article was originally published by Aurora.